Project Description
This project is a collaboration between Diego and Navya.
The main idea is to have a SpaceShip that would be controlled by the user. A webcam would read hand gestures of the user and control the SpaceShip accordingly. We would use some machine learning to accomplish this. The spaceship would essentially be a robot which would move around in a Play Area of sorts. It would have 2 wheels and a nice lego spaceship that sits on top of the wheels. It would interact with this play area and follow a certain storyline that we come up with. The storyline, of course is space based. The Play Area, or “Space” would have different “bases”, or locations on it. Each base would have a sensor and would be able to sense if the SpaceShip is at that base or not. We plan to make the Play Area out of cardboard and have some cool space designs on it, with different locations.
The main idea is to give the user a feel that they are on a space mission. By directing them to accomplish certain tasks, it gives that feel. The other aspect is to add a ‘wow’ element by being able to control the spaceship using hand movements or gestures. The two aspects combined should ideally make a fun and enjoyable experience for the user.
Here’s a diagram that outlines the idea in brief.
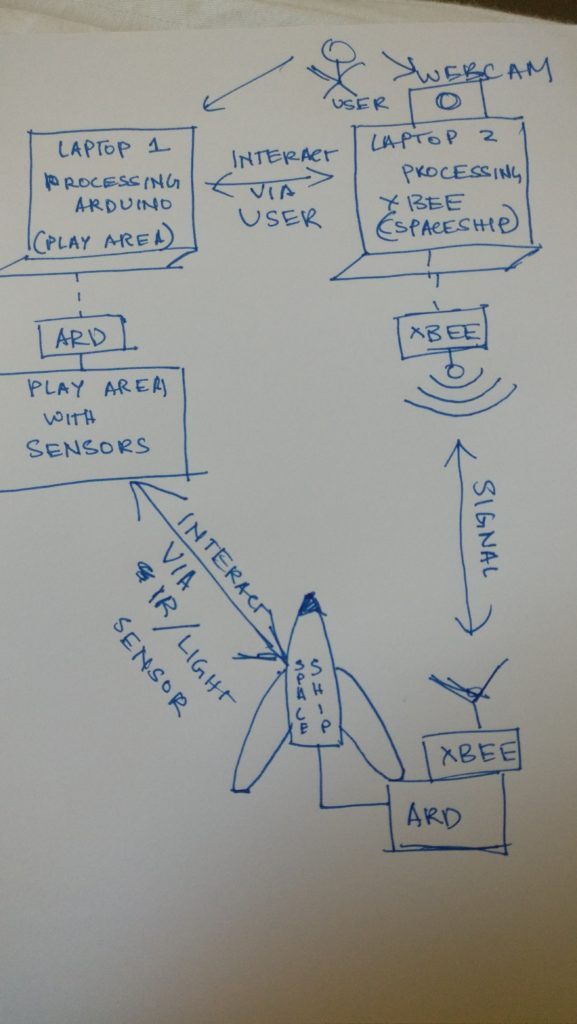
Below is a breakdown of the different components of our project.
2 Laptops. 1 runs the spaceship, the other runs the play area – refer diagram above.
SpaceShip – Move around and interacts with the play area. Gets the commands from the XBee connected to the webcam processing sketch.
Items – 1 Arduino, Acrylic sheets, 2 Motors, Motor Shield, 2 Wheels, XBee shield
Play Area (space) Contains sensors that detect the presence of spaceship. Relays this information to the processing sketch.
Items – 1 Very large cardboard piece, 1 Arduino, 8 Large IR RangeFinders, Black paint/cloth
Human Interaction Controls the movement of spaceship by some hand gestures. We would use Wekinator and some very basic machine learning.
StoryLine Gives a purpose to the movement of spaceship in the play area and makes it more interactive. This would be coded in the processing sketch.
Potential items that we would need (a compiled list)
- 2 Arduinos (already got)
- 2 Motors to move bot (already got)
- MotorShield (already got)
- 2 Wheels
- 2 XBees (already got)
- 1 Very huge cardboard sheet
- 8 IR rangefinders (already got)
- Analog Multiplexer. If this is not available, we need an Arduino Mega. This is because we need more than 8 analog inputs whereas Arduino Uno supports only 6 and the motorshield takes up 2. (Thanks Micheal for pointing this out)
- 1 fairly big screen for displaying the storyline nicely. HDMI cable too.
Things we need to learn!
- How to use the MotorShield
- How to use the XBees (done!)
- How to use the Arduino Mega (if we might need to use it)
- A little more about the wekinator and the machine learning part
Tools we might need to use
Nothing as of yet.
3 hardest elements of our project!!
- Construction of the SpaceShip
- Coding the hand gestures
- Creating the sequence of events in the play area and coding the storyline
We have not included a Block Diagram of the circuit because we are not sure at this point if we are using a multiplexer or a arduino mega. Once that is clear, we will update this post.